Elasticity - A Reminder#
Assuming everyone has taken ME035043, we will simply recap on some basic concepts. In case you need a more in-depth reminder, I recommend Applied Mechanics of solids by A.F. Bower and Elasticity: theory and applications by A.S. Saada Consider the following not as a lecture notes but more as a quiz for yourslef. If you are not familiar with any of the terms or equations - you need to go to the recommended sources.
Strain#
Given a displacemnts vector \(u\) the infinitsimal strain is defined as :
Note
In many FE codes the shear strains output is given as “Engineering shear strain” such that
The strain tensor can be divided to deviatric \(\pmb(e)\) and volumetric \(\epsilon_{kk}\) parts such that
The eigenvalues of \(\pmb{\epsilon}\) and corresponding eigenvectors will define the principal values \((e_i)\) and directions \((\pmb{n}^i)\) of the strain tensor.
Rotations#
Stress#
For (isotropic) linear elasticity, we can correlate the strains with the stresses using :
or, fiven the stress tensor, we can obtain the strains following:
Here, \(E\) is Young’s modulus, \(\nu\) is Poisson’s ratio, \(\alpha\) the thermal expansion coefficient and \(\Delta T\) stands for temperature increase (decrease)
The shear modulus \(G\) is defined as :
Strain Energy density#
The strain energy density \([Joule/m^3]\) is defined as :
Under linear elasticity we obtain
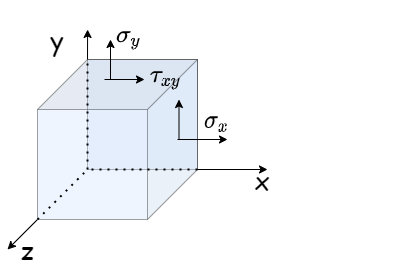
Plane stress#
Thin solids, (i.e. one dimension is significantly smaller than the other two) loaded in-plane, can be approximated using 2D plane stress assumptions. under this assumption :
Plane strain#
A solid body, whose deformation in one direction are severely restricted (consider the mid-sction of a thick body) can be assumed to be in a plane strain condition such that:
Solution to elasticity problems (static)#
Given an elastic body with applied tractions \(t_j^{ap}\) and displacements \(u_i^{ap}\) we seek to find a solution which will satisfy:
as well as the B.C:
on the portions of the boundary where they are defined