Dynamic Systems - Part 2
Contents
8. Dynamic Systems - Part 2¶
import numpy as np
import matplotlib.pyplot as plt
from ipywidgets import widgets, interact
from IPython import display
Reminder from last lecture:
An \(N^{th}\) order system with an output signal \(y(t)\), when subjected to a general input signal represented by the forcing signal \(F(t)\) is given by:
and the coefficients \(a_i\) and \(b_j\) are a representation of physical parameters of the measuring system
8.1. 2\(^{nd}\) order systems¶
Normalizing the equation by \(a_2\) will lead to :
With :
In the above equation the three constnat are:
\(\color{green}{K}\) - gain parameter (similar to the linear sensitivity from before)
\(\color{red}{\xi}\) - damping parameter
\(\color{blue}{\tau_S}\) - characteristic time
8.2. Load cell as a \(2^{nd}\) order system¶
Many load cells rely on the elastic deformation of a structure with a known compliance. By measuring the deformation (using e.g. strain gauges) and relying on the compliance the force is extracted (think of a simple spring, it’s not that different as a 0 order approximation).
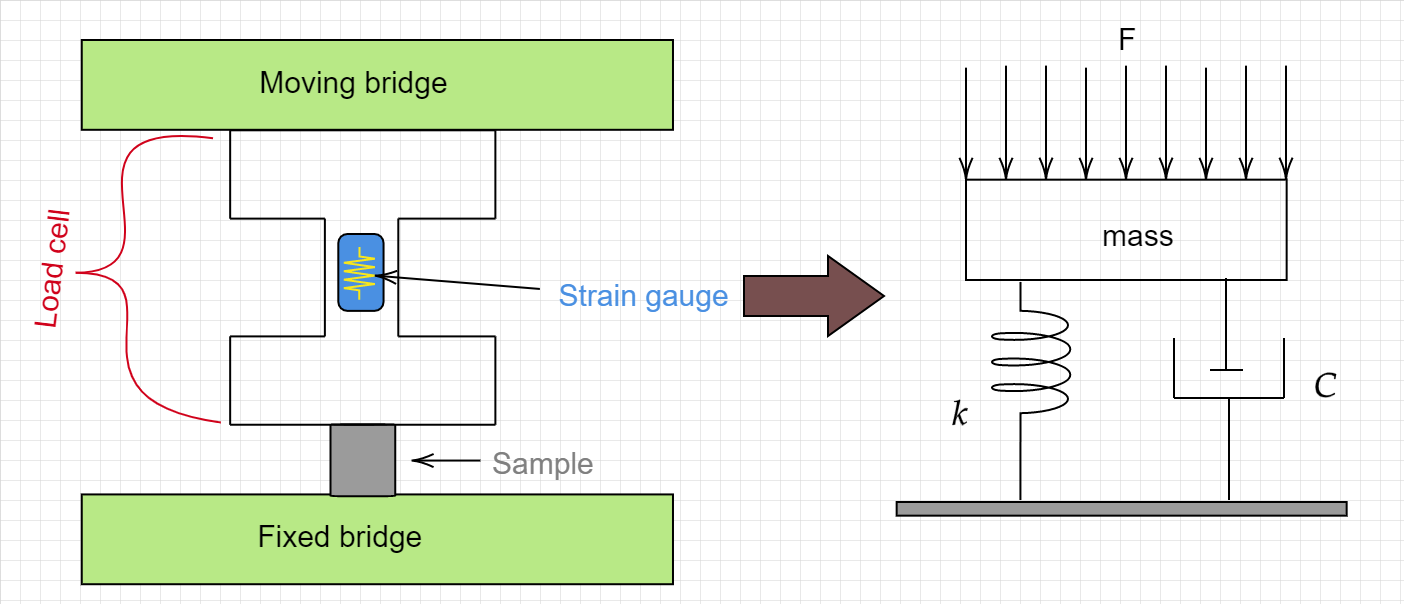
The applied force is being opposed by two components, a linear spring with a spring constant \(\color{blue}{k}\) and a dashpot characterized by \(\color{red}{C}\)
We can model this system using the following set of equations:
From the above we easily obtain that :
Note
The applied force \(F\) is not the same as the measured force \(F_m\) due to the damping of the system. Can you estimate under what conditions \(F=F_m\) ?
Rearranging the \(2^{nd}\) order system, and adding a time delay parameter to the input function (remember the dashpot) we can write our equation as
Which we will solve numerically using scipy.integrate.odeint
from scipy.integrate import odeint
K = 1.2
tau = 0.2
zeta = 0.1
theta = 0.0
du = 1.0
yInf = K*du
def SOS_ODE(x,t):
y = x[0]
dydt = x[1]
dy2dt2 = (-2.0*zeta*tau*dydt - y + K*du)/tau**2
return [dydt,dy2dt2]
t = np.arange(0,14,0.010)
x = odeint(SOS_ODE,[0,0],t)
y = x[:,0]
yInf = K*du
fig, ax = plt.subplots(figsize=(18, 8),sharex=True, sharey=True)
ax.plot(t,y,'r-',linewidth=2,label='ODE Integrator')
ax.plot([0,max(t)],[yInf,yInf],'k--')
ax.plot([0,max(t)],[1.1*yInf,1.1*yInf],'b--')
ax.plot([0,max(t)],[0.9*yInf,0.9*yInf],'b--')
ax.set_xlabel('Time', fontsize=14)
ax.set_ylabel('y(t)', fontsize=14)
---------------------------------------------------------------------------
ModuleNotFoundError Traceback (most recent call last)
Input In [2], in <cell line: 1>()
----> 1 from scipy.integrate import odeint
2 K = 1.2
3 tau = 0.2
ModuleNotFoundError: No module named 'scipy'
solving for a sin() input
import scipy.signal as sg
#K = 1.5
#tau = 0.8
#zeta = 0.4
theta = 0.0
#here we will use the transfer function
%matplotlib inline
plt.rcParams['figure.figsize'] = [20, 10]
def second_order_w_sin(tau,K,xi,Omega):
Tvec = np.arange(0.0, 20*np.pi/Omega, 0.05)
num = [K]
den = [np.power(tau,2),2*xi*tau,1]
SoS = sg.TransferFunction(num,den)
Ft = np.sin(Omega*Tvec)
Tout, sinRes, xout = sg.lsim(SoS, Ft, Tvec)
fig, ax = plt.subplots(1, 1, figsize=(18, 8),sharex=False, sharey=False)
ax.plot(Tvec*Omega/(2*np.pi), sinRes,label='system response',color='blue')
ax.plot(Tvec*Omega/(2*np.pi), Ft,label='system input',color='green')
ax.set_xlabel('Normalized time')
ax.set_title(r'response to s sin input $\omega \tau$ = %f'%(Omega*tau), fontsize=14)
ax.legend()
# Simulate tau * dy/dt = -y + F(omega)
interact(second_order_w_sin, tau = (0.1,5,0.1), K= (0.0,2,0.1), xi= (0.0,1,0.05), Omega = (0.1,5,0.1))
<function __main__.second_order_w_sin(tau, K, xi, Omega)>
So….
What will happen if we have a mass with negligible accelaration but finite velocity?
we can write the dynamic error as
a rising force, will lead to a positive \(\dot{x}_m\) resulting in a negative \(e\) and vice versa.
In other words, the damping is behind the measured hysteresis
Let’s try to sum it up :
Sensor’s property |
System behavior |
|---|---|
\(\big\Downarrow\) \(k\) |
High sensitivity |
\(\big\Downarrow\) \(\xi\),\(\to\) \(\big\Downarrow\) \(C\) |
Low hysteresis |
\(\big\Downarrow\) m, \(\big\Downarrow\) \(\xi\), \(\big\Uparrow\) \(\omega_0\), \(\big\Downarrow\) \(k\) |
Minimize the phase shift over a large frequency range |
\(\big\Downarrow\) m, \(\big\Downarrow\) \(\xi\), \(\big\Uparrow\) \(\omega_0\), \(\big\Downarrow\) \(k\) |
Amplitude ratio approaching 1 over a large frequency range |
\(\xi\) sufficiently large (or not too small) |
Decrease “ringing” due to step input |