5 L03 — Continuum Kinematics
Deformation, Strain Measures, and Stress Tensors
5.1 The Deformation Map
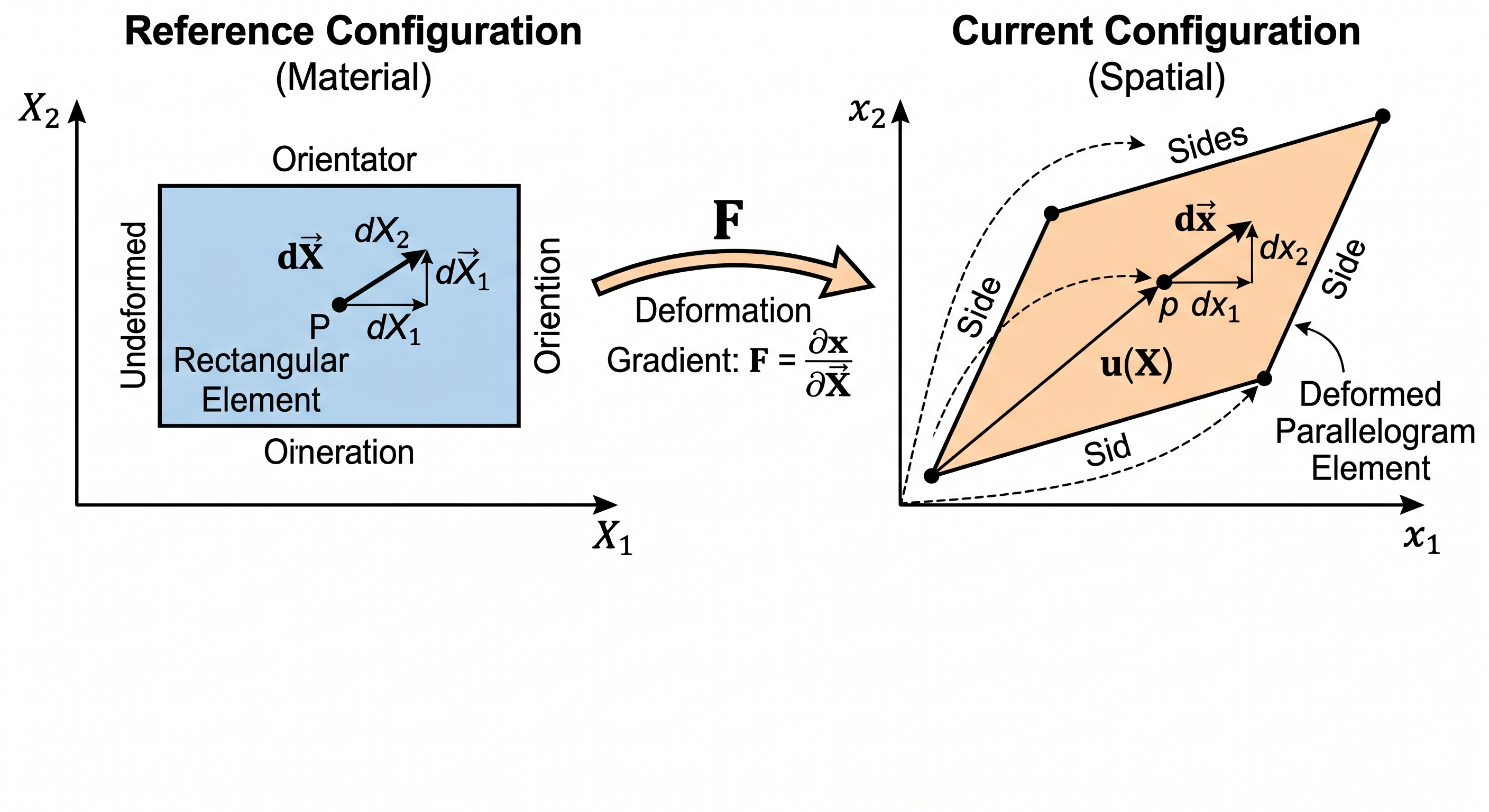
A body \(\mathcal{B}\) occupies a reference (material, Lagrangian) configuration \(\Omega_0\) at some initial time. After deformation, it occupies a current (spatial, Eulerian) configuration \(\Omega_t\) at time \(t\).
The deformation map (or motion) \(\boldsymbol{\varphi}\) is a smooth bijection that carries each material point from the reference configuration to the current configuration: \[ \mathbf{x} = \boldsymbol{\varphi}(\mathbf{X}, t), \qquad \boldsymbol{\varphi}: \Omega_0 \times [0, T] \to \Omega_t. \]
The displacement field is defined as: \[ \mathbf{u}(\mathbf{X}, t) = \mathbf{x} - \mathbf{X} = \boldsymbol{\varphi}(\mathbf{X}, t) - \mathbf{X}. \]
By convention (notation canon, A01): - Reference-config quantities use uppercase Latin indices or letters: \(\mathbf{X}\) (position), \(dV, dA\) (volume/area elements), \(\mathbf{N}\) (normal), \(\rho_0\) (density). - Current-config quantities use lowercase: \(\mathbf{x}, dv, da, \mathbf{n}, \rho\).
5.2 Material vs. Spatial Descriptions
A field quantity \(\phi\) can be expressed in two ways:
Material (Lagrangian) description: \(\phi(\mathbf{X}, t)\) — follow a specific material point as it moves.
Spatial (Eulerian) description: \(\phi(\mathbf{x}, t)\) — observe the field at fixed spatial locations.
These are related by the deformation map. For example, if a scalar field has material form \(\phi_m(\mathbf{X}, t)\), its spatial form is: \[ \phi_s(\mathbf{x}, t) = \phi_m(\boldsymbol{\varphi}^{-1}(\mathbf{x}, t), t). \]
The material time derivative (following a material point) is: \[ \dot{\phi} = \frac{D\phi}{Dt} = \frac{\partial\phi_s}{\partial t}\bigg|_{\mathbf{x}} + \mathbf{v} \cdot \nabla_{\mathbf{x}}\phi_s = \frac{\partial\phi_s}{\partial t} + v_i\frac{\partial\phi_s}{\partial x_i}, \]
where \(\mathbf{v}(\mathbf{x}, t) = \dot{\boldsymbol{\varphi}}(\mathbf{X}, t)\) is the velocity field. The first term is the local rate (change at a fixed point); the second is the advective rate (material sweeping through the field).
Physical interpretation: In a laboratory experiment, we may measure quantities at fixed locations (Eulerian, e.g., temperature at a probe). In a material simulation, we track each grain of material (Lagrangian, e.g., stress at a Gauss point). Both views are valid; we switch between them using \(\mathbf{v}\) and \(\mathbf{F}\).
| Material | Spatial | |
|---|---|---|
| Symbol | \(\phi(\mathbf{X}, t)\) | \(\phi(\mathbf{x}, t)\) |
| Meaning | Follow material point | Observe at fixed location |
| Time derivative | \(\partial\phi/\partial t\big\|_{\mathbf{X}}\) | \(D\phi/Dt = \partial\phi/\partial t\big\|_{\mathbf{x}} + \mathbf{v}\cdot\nabla_{\mathbf{x}}\phi\) |
| Example | \(T(\mathbf{X}, t)\) in a grain | \(T(\mathbf{x}, t)\) at a thermometer location |
5.3 The Deformation Gradient — Extensive Treatment
5.3.1 Definition and Basic Properties
The deformation gradient \(\mathbf{F}\) is the Jacobian matrix of the deformation map: \[ \mathbf{F} = \frac{\partial\mathbf{x}}{\partial\mathbf{X}} = \nabla_{\mathbf{X}}\boldsymbol{\varphi}. \]
In index notation (with lowercase \(i\) for current config, uppercase \(J\) for reference): \[ F_{iJ} = \frac{\partial x_i}{\partial X_J}. \]
Two-point tensor character: This is the defining feature of \(\mathbf{F}\). The first index lives in the current configuration (lowercase = spatial); the second in the reference configuration (uppercase = material). As a result, \(\mathbf{F}\) is not purely a spatial or purely a material tensor. It maps vectors from material space to spatial space: \[ d\mathbf{x} = \mathbf{F} \, d\mathbf{X}. \]
This duality is crucial: \(\mathbf{F}\) lives in both configurations simultaneously and measures the local stretching and rotation caused by \(\boldsymbol{\varphi}\).
The Jacobian determinant: \[ J = \det\mathbf{F} > 0 \] must be strictly positive for a physical (orientation-preserving, non-interpenetrating) deformation. \(J\) is the local volume ratio: \[ dv = J \, dV. \]
Physical interpretation: If we zoom in on an infinitesimal material volume element around a point, the deformation gradient tells us how that element’s shape and size change. A rigid-body rotation has \(\mathbf{F} = \mathbf{R}\) (orthogonal, \(J = 1\)). Stretching changes the eigenvalues of \(\mathbf{F}\). Compression reduces \(J\) below 1; expansion increases it above 1.
5.3.2 Geometric Mappings Induced by \(\mathbf{F}\)
Line elements: An infinitesimal line segment \(d\mathbf{X}\) in the reference config maps to: \[ d\mathbf{x} = \mathbf{F} \, d\mathbf{X}. \]
Area elements (Nanson’s formula): A surface element with current normal \(\mathbf{n}\) and area \(da\) relates to the reference element (normal \(\mathbf{N}\), area \(dA\)) by: \[ \mathbf{n} \, da = J \mathbf{F}^{-T} \mathbf{N} \, dA. \]
Derivation sketch: The oriented area element is a vector perpendicular to the surface. Infinitesimal parallelograms in the reference config with sides \(d\mathbf{X}_1, d\mathbf{X}_2\) and normal \(\mathbf{N} \, dA\) map to spatial parallelograms with sides \(\mathbf{F}\,d\mathbf{X}_1, \mathbf{F}\,d\mathbf{X}_2\). Their normal is proportional to \((\mathbf{F}\,d\mathbf{X}_1) \times (\mathbf{F}\,d\mathbf{X}_2) = J \mathbf{F}^{-T} (d\mathbf{X}_1 \times d\mathbf{X}_2)\) (by the adjugate formula). Thus \(\mathbf{n} \, da = J \mathbf{F}^{-T} \mathbf{N} \, dA\).
Volume elements: \[ dv = J \, dV. \]
Derivation: An infinitesimal parallelepiped with edges \(d\mathbf{X}_1, d\mathbf{X}_2, d\mathbf{X}_3\) has volume \(dV = |d\mathbf{X}_1 \cdot (d\mathbf{X}_2 \times d\mathbf{X}_3)|\). Mapping to the current config: \(dv = |(\mathbf{F}\,d\mathbf{X}_1) \cdot ((\mathbf{F}\,d\mathbf{X}_2) \times (\mathbf{F}\,d\mathbf{X}_3))| = |\det\mathbf{F}| \, dV = J \, dV\).
5.3.3 Push-Forward and Pull-Back
Given \(\mathbf{F}\), we can move quantities between configurations:
Push-forward of vectors: \(\mathbf{v}\) (ref) \(\to\) \(\mathbf{v}\) (curr): \(\mathbf{v}_\text{curr} = \mathbf{F} \mathbf{v}_\text{ref}\).
Pull-back of vectors: \(\mathbf{v}\) (curr) \(\to\) \(\mathbf{v}\) (ref): \(\mathbf{v}_\text{ref} = \mathbf{F}^{-1} \mathbf{v}_\text{curr}\).
Push-forward of tensors: \(\mathbf{A}\) (ref, second-order) \(\to\) \(\mathbf{A}\) (curr): \(\mathbf{A}_\text{curr} = \mathbf{F} \mathbf{A}_\text{ref} \mathbf{F}^T\).
Pull-back of tensors: \(\mathbf{A}\) (curr) \(\to\) \(\mathbf{A}\) (ref): \(\mathbf{A}_\text{ref} = \mathbf{F}^{-T} \mathbf{A}_\text{curr} \mathbf{F}^{-1}\).
(These definitions ensure that inner products are preserved: if \(\mathbf{u}_\text{ref} \to \mathbf{v}_\text{curr} = \mathbf{F}\mathbf{u}_\text{ref}\) and \(\mathbf{v}_\text{ref} \to \mathbf{w}_\text{curr} = \mathbf{F}\mathbf{v}_\text{ref}\), then \(\mathbf{v}_\text{curr} \cdot \mathbf{w}_\text{curr} = (\mathbf{F}\mathbf{u})^T(\mathbf{F}\mathbf{v}) = \mathbf{u}^T(\mathbf{F}^T\mathbf{F})\mathbf{v}\) involves the right Cauchy-Green tensor \(\mathbf{C} = \mathbf{F}^T\mathbf{F}\).)
5.3.4 Worked Example: Simple Shear
Consider the deformation \(x_1 = X_1 + \gamma X_2, x_2 = X_2, x_3 = X_3\) (shear in the \(x_1\)-\(x_2\) plane with shear strain \(\gamma\)).
\[ \mathbf{F} = \begin{pmatrix} 1 & \gamma & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix}, \quad J = \det\mathbf{F} = 1. \]
The deformation is isochoric (volume-preserving). A line element initially along \(\mathbf{e}_2\) (the 1,0,0]\(^T\) direction in the reference) maps to \((1, \gamma, 0)^T\) in the current — it rotates and stretches due to the shear.
5.3.5 Worked Example: Uniaxial Stretch
A uniform stretch: \(x_1 = \lambda_1 X_1, x_2 = \lambda_2 X_2, x_3 = \lambda_3 X_3\).
\[ \mathbf{F} = \begin{pmatrix} \lambda_1 & 0 & 0 \\ 0 & \lambda_2 & 0 \\ 0 & 0 & \lambda_3 \end{pmatrix}, \quad J = \lambda_1\lambda_2\lambda_3. \]
The principal stretches are the diagonal entries. If \(\lambda_1 > 1\) and \(\lambda_2 = \lambda_3 < 1\) with \(\lambda_1\lambda_2^2 = 1\), the material stretches in one direction and compresses perpendicular to preserve volume (like squeezing a rubber ball in one axis).
5.3.6 Worked Example: Rigid-Body Rotation
A rotation about the \(\mathbf{e}_3\) axis by angle \(\theta\):
\[ \mathbf{F} = \begin{pmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{pmatrix} = \mathbf{R}. \]
Here, \(\mathbf{F} = \mathbf{R}\) (orthogonal), \(\mathbf{R}^T\mathbf{R} = \mathbf{I}\), and \(J = 1\). The right Cauchy-Green tensor is \(\mathbf{C} = \mathbf{F}^T\mathbf{F} = \mathbf{R}^T\mathbf{R} = \mathbf{I}\). No strain occurs (shape and volume are unchanged); the material simply rotates as a rigid body.
5.4 Strain Measures — Extensive Treatment
5.4.1 Motivation: Measuring Change in Length
Consider two neighboring material points separated by an infinitesimal line element \(d\mathbf{X}\) in the reference config. After deformation, they are separated by \(d\mathbf{x} = \mathbf{F} \, d\mathbf{X}\).
The squared lengths are: \[ dS^2 = d\mathbf{X} \cdot d\mathbf{X}, \quad ds^2 = d\mathbf{x} \cdot d\mathbf{x} = (d\mathbf{X})^T \mathbf{F}^T\mathbf{F} \, d\mathbf{X}. \]
We seek a strain measure that: 1. Vanishes when there is no deformation (\(d\mathbf{x} = d\mathbf{X}\)). 2. Is zero for rigid rotations (where shape is unchanged). 3. Captures the change in length and angle between material line elements.
The key insight is that: \[ ds^2 - dS^2 = d\mathbf{X}^T(\mathbf{F}^T\mathbf{F} - \mathbf{I}) \, d\mathbf{X} = 2 \, d\mathbf{X}^T\mathbf{E} \, d\mathbf{X}, \]
where \(\mathbf{E} = \tfrac{1}{2}(\mathbf{F}^T\mathbf{F} - \mathbf{I})\) is the Green-Lagrange strain tensor.
5.4.2 Right Cauchy-Green Deformation Tensor
\[ \mathbf{C} = \mathbf{F}^T\mathbf{F}. \]
In index notation: \(C_{JK} = F_{iJ}F_{iK}\) (material indices).
Properties: - Symmetric and positive-definite. - Lives in the reference configuration (both indices uppercase). - \(\mathbf{C} = \mathbf{I}\) when there is no deformation.
Physical interpretation: \(\mathbf{C}\) encodes all the deformation information. If we compute \(d\mathbf{X}^T\mathbf{C}\,d\mathbf{X}\), we get \(ds^2\), the squared length in the current config. The components of \(\mathbf{C}\) in a given direction tell us how much that direction has been stretched and rotated.
5.4.3 Green-Lagrange Strain Tensor
\[ \mathbf{E} = \tfrac{1}{2}(\mathbf{C} - \mathbf{I}) = \tfrac{1}{2}(\mathbf{F}^T\mathbf{F} - \mathbf{I}). \]
Derivation: From \(ds^2 - dS^2 = d\mathbf{X}^T(\mathbf{C} - \mathbf{I}) \, d\mathbf{X}\), we define \(\mathbf{E}\) so that: \[ ds^2 - dS^2 = 2 \, d\mathbf{X}^T\mathbf{E} \, d\mathbf{X}. \]
The factor of 2 is conventional; it makes the strain “compatible” with the infinitesimal strain (see below).
Properties: - Symmetric, material-configuration tensor. - \(\mathbf{E} = \mathbf{0}\) means \(\mathbf{C} = \mathbf{I}\), i.e., no deformation. - For a rigid rotation, \(\mathbf{F} = \mathbf{R}\), so \(\mathbf{E} = \tfrac{1}{2}(\mathbf{R}^T\mathbf{R} - \mathbf{I}) = \mathbf{0}\) ✓
In terms of displacement: Since \(\mathbf{F} = \mathbf{I} + \nabla_{\mathbf{X}}\mathbf{u}\), \[ \mathbf{E} = \tfrac{1}{2}(\nabla_{\mathbf{X}}\mathbf{u} + \nabla_{\mathbf{X}}\mathbf{u}^T + (\nabla_{\mathbf{X}}\mathbf{u})^T\nabla_{\mathbf{X}}\mathbf{u}). \]
This is the finite-strain displacement-strain relation. The first two terms (linear in \(\nabla_{\mathbf{X}}\mathbf{u}\)) are the infinitesimal part; the last (quadratic) is the geometric nonlinearity.
5.4.4 Left Cauchy-Green / Finger Deformation Tensor
\[ \mathbf{b} = \mathbf{F}\mathbf{F}^T. \]
In index notation: \(b_{ij} = F_{iJ}F_{jJ}\) (spatial indices).
Properties: - Symmetric and positive-definite, spatial-configuration tensor. - \(\mathbf{b} = \mathbf{I}\) when there is no deformation.
Relation to \(\mathbf{C}\): They are not equal, but both encode the stretch information through their eigenvalues. We have: \[ (\mathbf{F}^T\mathbf{F})(\mathbf{F}^{-1}\mathbf{F}^{-T}) = \mathbf{F}^T \mathbf{F}, \] which is different. However, the right and left stretches (to be introduced below) have the same eigenvalues, and so do \(\mathbf{C}\) and \(\mathbf{b}\) (the eigenvalues of \(\mathbf{b}\) are \(\lambda_i^2\)).
5.4.5 Euler-Almansi Strain Tensor
\[ \mathbf{e} = \tfrac{1}{2}(\mathbf{I} - \mathbf{b}^{-1}) = \tfrac{1}{2}(\mathbf{I} - (\mathbf{F}\mathbf{F}^T)^{-1}). \]
Derivation: Starting from line elements in the spatial config, \(d\mathbf{x}\) and using \(d\mathbf{X} = \mathbf{F}^{-1}d\mathbf{x}\): \[ dS^2 = (d\mathbf{x})^T\mathbf{F}^{-T}\mathbf{F}^{-1}d\mathbf{x}, \quad ds^2 = d\mathbf{x} \cdot d\mathbf{x}. \]
So \(ds^2 - dS^2 = d\mathbf{x}^T(\mathbf{I} - \mathbf{F}^{-T}\mathbf{F}^{-1})d\mathbf{x} = 2 d\mathbf{x}^T\mathbf{e}\,d\mathbf{x}\), giving \(\mathbf{e} = \tfrac{1}{2}(\mathbf{I} - \mathbf{b}^{-1})\).
Properties: - Symmetric, spatial-configuration tensor. - \(\mathbf{e} = \mathbf{0}\) when \(\mathbf{b} = \mathbf{I}\) (no deformation) ✓ - For rigid rotation, \(\mathbf{e} = \mathbf{0}\) ✓
Relation to Green-Lagrange strain: The pull-back of \(\mathbf{e}\) to the reference config is \(\mathbf{E}\): \[ \mathbf{E} = \mathbf{F}^T\mathbf{e}\mathbf{F}. \]
5.4.6 Infinitesimal Strain
When deformations are small, \(|\nabla_{\mathbf{X}}\mathbf{u}| \ll 1\), we drop the quadratic terms: \[ \boldsymbol{\varepsilon} = \tfrac{1}{2}(\nabla_{\mathbf{X}}\mathbf{u} + (\nabla_{\mathbf{X}}\mathbf{u})^T) = \operatorname{sym}(\nabla_{\mathbf{X}}\mathbf{u}). \]
In this limit, \(\mathbf{E} \approx \mathbf{e} \approx \boldsymbol{\varepsilon}\) (all three strain measures converge), and we no longer distinguish reference from spatial coordinates.
Index notation: \(\varepsilon_{ij} = \tfrac{1}{2}\left(\frac{\partial u_i}{\partial X_j} + \frac{\partial u_j}{\partial X_i}\right)\).
Key distinction: \(\mathbf{E}, \mathbf{e}\) are finite-strain measures (finite deformations). \(\boldsymbol{\varepsilon}\) is the small-strain limit. For structures undergoing large deformations (rubber, metals in forming, large-strain plasticity), you must use \(\mathbf{E}\) or \(\mathbf{e}\) and the corresponding constitutive laws (L05, L06). For small deformations (most linear FEA), \(\boldsymbol{\varepsilon}\) and additive decompositions are sufficient (L07–L09).
5.4.7 Piola and Cauchy Deformation Tensors (Reference)
Two related deformation tensors appear in some literature:
Piola deformation tensor: \(\mathbf{B}_\text{Piola} = \mathbf{C}^{-1} = (\mathbf{F}^T\mathbf{F})^{-1}\). (Note: This is sometimes called the “inverse right Cauchy-Green” and should not be confused with the left Cauchy-Green \(\mathbf{b}\).)
Cauchy deformation tensor: \(\mathbf{c} = \mathbf{b}^{-1} = (\mathbf{F}\mathbf{F}^T)^{-1}\) (spatial). It is the inverse of the Finger tensor.
These are less commonly used in modern courses but appear in classical continuum mechanics texts.
5.4.8 Summary Table
| Tensor | Formula | Configuration | Deformation-free value |
|---|---|---|---|
| Right Cauchy-Green | \(\mathbf{C} = \mathbf{F}^T\mathbf{F}\) | Reference | \(\mathbf{I}\) |
| Left Cauchy-Green / Finger | \(\mathbf{b} = \mathbf{F}\mathbf{F}^T\) | Current | \(\mathbf{I}\) |
| Green-Lagrange strain | \(\mathbf{E} = \tfrac{1}{2}(\mathbf{C} - \mathbf{I})\) | Reference | \(\mathbf{0}\) |
| Almansi strain | \(\mathbf{e} = \tfrac{1}{2}(\mathbf{I} - \mathbf{b}^{-1})\) | Current | \(\mathbf{0}\) |
| Infinitesimal strain | \(\boldsymbol{\varepsilon} = \operatorname{sym}(\nabla_{\mathbf{X}}\mathbf{u})\) | Either (small-strain) | \(\mathbf{0}\) |
5.5 Stretch and Rotation — Polar Decomposition
5.5.1 Theorem: Unique Polar Decompositions
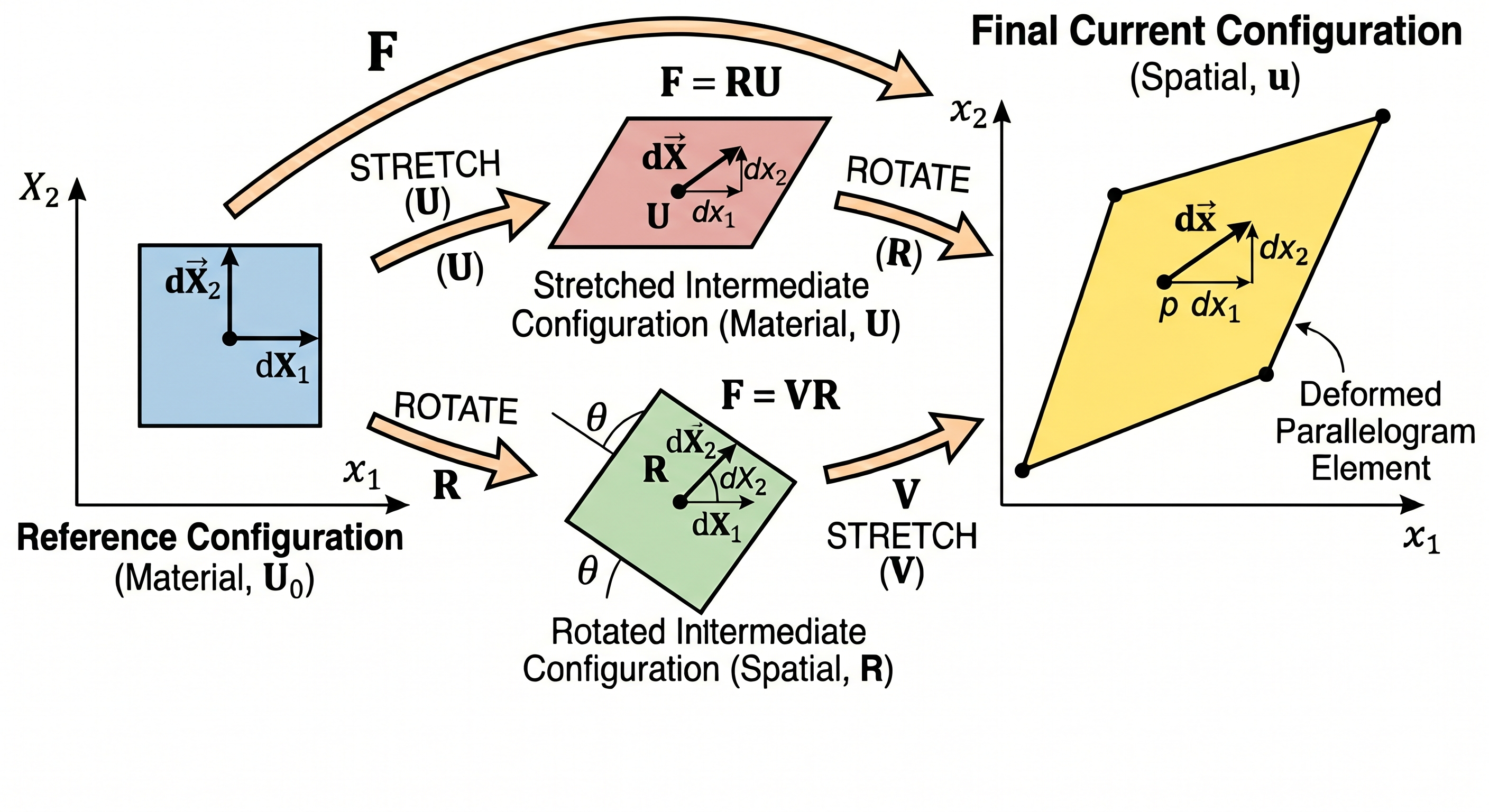
Theorem. Every invertible deformation gradient \(\mathbf{F}\) can be uniquely decomposed as: \[ \mathbf{F} = \mathbf{R}\mathbf{U} = \mathbf{V}\mathbf{R}, \]
where: - \(\mathbf{R}\) is an orthogonal (rotation) tensor, \(\mathbf{R}^T\mathbf{R} = \mathbf{I}\), \(\det\mathbf{R} = +1\). - \(\mathbf{U}\) is a right stretch tensor (material, symmetric positive-definite). - \(\mathbf{V}\) is a left stretch tensor (spatial, symmetric positive-definite). - \(\mathbf{R}\) is the same in both decompositions; \(\mathbf{V} = \mathbf{R}\mathbf{U}\mathbf{R}^T\) (they are related by a rotation).
Proof sketch: The right Cauchy-Green tensor \(\mathbf{C} = \mathbf{F}^T\mathbf{F}\) is symmetric and positive-definite. It therefore admits a unique symmetric positive-definite square root \(\mathbf{U} = \sqrt{\mathbf{C}}\). Define \(\mathbf{R} = \mathbf{F}\mathbf{U}^{-1}\). Then: \[ \mathbf{R}^T\mathbf{R} = (\mathbf{F}\mathbf{U}^{-1})^T(\mathbf{F}\mathbf{U}^{-1}) = \mathbf{U}^{-1}\mathbf{F}^T\mathbf{F}\mathbf{U}^{-1} = \mathbf{U}^{-1}\mathbf{C}\mathbf{U}^{-1} = \mathbf{U}^{-1}(\mathbf{U}^2)\mathbf{U}^{-1} = \mathbf{I}. \]
So \(\mathbf{R}\) is orthogonal, \(\det\mathbf{R} = \det\mathbf{F}/\det\mathbf{U} > 0\), thus \(\det\mathbf{R} = +1\). Similarly, \(\mathbf{U} = \mathbf{F}^T\mathbf{F}\) relates to \(\mathbf{V}\) via \(\mathbf{V} = \mathbf{R}\mathbf{U}\mathbf{R}^T\).
5.5.2 The Two Decompositions: Physical Interpretation
Right decomposition (\(\mathbf{F} = \mathbf{R}\mathbf{U}\)):
The material is first stretched by \(\mathbf{U}\) in the reference frame, then rotated by \(\mathbf{R}\) into the current frame.
Physically, imagine a material element: \(\mathbf{U}\) captures the shape change (elongation, shearing) relative to the reference material axes. Then \(\mathbf{R}\) captures the rigid-body rotation of those axes into the current spatial frame.
Left decomposition (\(\mathbf{F} = \mathbf{V}\mathbf{R}\)):
The material is first rotated by \(\mathbf{R}\), then stretched by \(\mathbf{V}\) in the current frame.
Physically, the material first rotates (so the deforming axes align with the current frame), then stretches relative to the current directions.
5.5.3 Relating the Two Stretches
\[ \mathbf{V} = \mathbf{R}\mathbf{U}\mathbf{R}^T. \]
This shows that \(\mathbf{U}\) and \(\mathbf{V}\) are similar tensors — they have the same eigenvalues (principal stretches) but eigenvectors rotated by \(\mathbf{R}\).
Relation to Cauchy-Green tensors: \[ \mathbf{C} = \mathbf{F}^T\mathbf{F} = \mathbf{U}^2, \quad \mathbf{b} = \mathbf{F}\mathbf{F}^T = \mathbf{V}^2. \]
So we compute \(\mathbf{U}\) by taking the symmetric square root of \(\mathbf{C}\), and \(\mathbf{V}\) by taking the symmetric square root of \(\mathbf{b}\).
5.5.4 Principal Stretches
The principal stretches \(\lambda_1, \lambda_2, \lambda_3\) are the eigenvalues of both \(\mathbf{U}\) and \(\mathbf{V}\) (same values, but rotated directions): \[ \lambda_i^2 \text{ are the eigenvalues of } \mathbf{C} \text{ and } \mathbf{b}. \]
In the principal basis (aligned with the eigenvectors of \(\mathbf{U}\)): \[ \mathbf{U} = \text{diag}(\lambda_1, \lambda_2, \lambda_3), \quad \mathbf{C} = \text{diag}(\lambda_1^2, \lambda_2^2, \lambda_3^2). \]
Physical interpretation: \(\lambda_i\) is the stretch ratio along the \(i\)-th principal direction. A material fiber initially aligned with the \(i\)-th principal axis is stretched by a factor \(\lambda_i\). For a rigid rotation, \(\lambda_i = 1\) for all \(i\), so \(\mathbf{U} = \mathbf{V} = \mathbf{I}\) and \(\mathbf{F} = \mathbf{R}\).
5.5.5 Worked Example: Simple Shear Polar Decomposition
Consider again \(\mathbf{F} = \begin{pmatrix} 1 & \gamma & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix}\) (plane shear by \(\gamma\)).
\[ \mathbf{C} = \mathbf{F}^T\mathbf{F} = \begin{pmatrix} 1 & \gamma & 0 \\ \gamma & 1 + \gamma^2 & 0 \\ 0 & 0 & 1 \end{pmatrix}. \]
For small \(\gamma\), the eigenvalues of \(\mathbf{C}\) are approximately \(\lambda_1^2 \approx 1 + \gamma^2, \lambda_2^2 \approx 1, \lambda_3^2 = 1\), giving \(\lambda_1 \approx 1 + \gamma^2/2, \lambda_2 \approx 1, \lambda_3 = 1\). The deformation consists of a small stretch/compression in two directions and a rotation mixing them.
5.5.6 Spectral Decomposition
We can write \(\mathbf{U}\) and \(\mathbf{V}\) in spectral form: \[ \mathbf{U} = \sum_{i=1}^3 \lambda_i \mathbf{N}_i \otimes \mathbf{N}_i, \quad \mathbf{V} = \sum_{i=1}^3 \lambda_i \mathbf{n}_i \otimes \mathbf{n}_i, \]
where \(\mathbf{N}_i\) are the principal directions in the reference config (eigenvectors of \(\mathbf{C}\)) and \(\mathbf{n}_i\) are the principal directions in the current config (eigenvectors of \(\mathbf{b}\)). The rotation tensor maps them: \[ \mathbf{n}_i = \mathbf{R}\mathbf{N}_i. \]
5.6 Volume Changes and Isochoric Decomposition
5.6.1 The Jacobian as a Volume Ratio
As established earlier, \(J = \det\mathbf{F}\) is the local volume ratio: \[ dv = J \, dV. \]
A material element at a point can change its volume (through hydrostatic pressure or incompressibility constraints) and its shape independently. For nearly-incompressible materials like rubber or plasticity at small volume change, it is useful to decompose the deformation into these parts.
5.6.2 Isochoric (Volume-Preserving) Decomposition
Define the isochoric deformation gradient: \[ \bar{\mathbf{F}} = J^{-1/3}\mathbf{F}. \]
Note that: \[ \det\bar{\mathbf{F}} = \det(J^{-1/3}\mathbf{F}) = (J^{-1/3})^3 \det\mathbf{F} = J^{-1} J = 1. \]
So \(\bar{\mathbf{F}}\) represents a volume-preserving deformation — it captures pure shape change without volume change.
The original deformation can be reconstructed: \[ \mathbf{F} = J^{1/3}\bar{\mathbf{F}}. \]
Isochoric Cauchy-Green tensors:
\[ \bar{\mathbf{C}} = \bar{\mathbf{F}}^T\bar{\mathbf{F}} = J^{-2/3}\mathbf{F}^T\mathbf{F} = J^{-2/3}\mathbf{C}, \quad \det\bar{\mathbf{C}} = 1. \]
Similarly for the left: \[ \bar{\mathbf{b}} = \bar{\mathbf{F}}\bar{\mathbf{F}}^T = J^{-2/3}\mathbf{b}, \quad \det\bar{\mathbf{b}} = 1. \]
5.6.3 Physical and Computational Utility
Many materials (elastomers, metals under pressure, plasticity) exhibit decoupled volumetric-deviatoric response: the stress can be split into a hydrostatic part (depending on volume change) and a deviatoric part (depending on shape change). With \(\bar{\mathbf{C}}\) and \(\bar{\mathbf{b}}\), we can write strain energies as: \[ W(\mathbf{C}) = W(\mathbf{C}, J) = W_\text{iso}(\bar{\mathbf{C}}) + W_\text{vol}(J), \]
where \(W_\text{iso}\) depends only on shape and \(W_\text{vol}\) only on volume. This separation is crucial for the hyperelastic formulations in L05 and plasticity in L07–L09.
5.7 Velocity Gradient and Strain Rate — Extensive Treatment
5.7.1 Definition of Velocity and Velocity Gradient
The velocity field is: \[ \mathbf{v}(\mathbf{x}, t) = \dot{\boldsymbol{\varphi}}(\mathbf{X}, t) \]
(the material time derivative of position).
The velocity gradient is the spatial gradient of velocity: \[ \mathbf{L} = \nabla_{\mathbf{x}}\mathbf{v} = \frac{\partial v_i}{\partial x_j}\mathbf{e}_i \otimes \mathbf{e}_j. \]
Fundamental relation: By the chain rule, \[ \dot{\mathbf{F}} = \frac{\partial \dot{\mathbf{x}}}{\partial \mathbf{X}} = \frac{\partial \mathbf{v}}{\partial \mathbf{x}} \cdot \frac{\partial \mathbf{x}}{\partial \mathbf{X}} = \mathbf{L} \cdot \mathbf{F}. \]
Thus: \[ \mathbf{L} = \dot{\mathbf{F}}\mathbf{F}^{-1}. \]
This is a key identity: \(\mathbf{L}\) is the time derivative of the deformation gradient in the spatial frame.
5.7.2 Symmetric and Skew Parts: Rate of Deformation and Spin
The velocity gradient decomposes uniquely into symmetric and skew-symmetric parts: \[ \mathbf{L} = \mathbf{D} + \mathbf{W}, \]
where: - Rate of deformation: \(\mathbf{D} = \operatorname{sym}\mathbf{L} = \tfrac{1}{2}(\mathbf{L} + \mathbf{L}^T)\). - Spin (vorticity): \(\mathbf{W} = \operatorname{skew}\mathbf{L} = \tfrac{1}{2}(\mathbf{L} - \mathbf{L}^T)\).
Index notation: \[ D_{ij} = \tfrac{1}{2}\left(\frac{\partial v_i}{\partial x_j} + \frac{\partial v_j}{\partial x_i}\right), \quad W_{ij} = \tfrac{1}{2}\left(\frac{\partial v_i}{\partial x_j} - \frac{\partial v_j}{\partial x_i}\right). \]
5.7.3 Physical Interpretation of \(\mathbf{D}\) and \(\mathbf{W}\)
Rate of deformation \(\mathbf{D}\): Measures how line elements are stretching and shearing. If we follow a material line element \(d\mathbf{x}(t)\), its rate of change is: \[ \frac{d}{dt}(d\mathbf{x}) = \mathbf{L} \, d\mathbf{x} = (\mathbf{D} + \mathbf{W}) d\mathbf{x}. \]
The symmetric part \(\mathbf{D}\) causes the length to change (through \(\mathbf{D}:\mathbf{d}\mathbf{x}\otimes d\mathbf{x}\)) and angles to change (shear).
Spin \(\mathbf{W}\): A skew-symmetric tensor, it represents the local rotation rate. The axial vector of \(\mathbf{W}\) is the angular velocity \(\boldsymbol{\omega}\): \[ \mathbf{W} \mathbf{v} = \boldsymbol{\omega} \times \mathbf{v} \]
(i.e., \(W_{ij}v_j = \varepsilon_{ijk}\omega_k v_j\)). The spin describes how neighboring material elements rotate relative to one another.
5.7.4 Rate of Green-Lagrange Strain
\[ \dot{\mathbf{E}} = \mathbf{F}^T\mathbf{D}\mathbf{F}. \]
Derivation: Since \(\mathbf{E} = \tfrac{1}{2}(\mathbf{F}^T\mathbf{F} - \mathbf{I})\), \[ \dot{\mathbf{E}} = \tfrac{1}{2}(\dot{\mathbf{F}}^T\mathbf{F} + \mathbf{F}^T\dot{\mathbf{F}}) = \tfrac{1}{2}((\mathbf{L}\mathbf{F})^T\mathbf{F} + \mathbf{F}^T\mathbf{L}\mathbf{F}) = \tfrac{1}{2}(\mathbf{F}^T\mathbf{L}^T\mathbf{F} + \mathbf{F}^T\mathbf{L}\mathbf{F}) = \mathbf{F}^T\operatorname{sym}(\mathbf{L})\mathbf{F} = \mathbf{F}^T\mathbf{D}\mathbf{F}. \]
Note that only the symmetric part \(\mathbf{D}\) contributes (the spin \(\mathbf{W}\) does not).
5.7.5 Rate of Jacobian
\[ \dot{J} = J \operatorname{tr}\mathbf{D} = J \operatorname{div}_{\mathbf{x}}\mathbf{v}. \]
Derivation: \(J = \det\mathbf{F}\), so by the chain rule, \[ \dot{J} = \frac{\partial\det\mathbf{F}}{\partial\mathbf{F}}:\dot{\mathbf{F}} = (\text{cof}\mathbf{F}):\dot{\mathbf{F}} = J(\mathbf{F}^{-T}:\dot{\mathbf{F}}) = J\operatorname{tr}(\mathbf{F}^{-T}\dot{\mathbf{F}}) = J\operatorname{tr}(\mathbf{F}^{-1}\mathbf{L}\mathbf{F}) = J\operatorname{tr}\mathbf{L} = J\operatorname{tr}\mathbf{D}. \]
Since \(\operatorname{tr}\mathbf{L} = \partial v_i/\partial x_i = \operatorname{div}\mathbf{v}\).
Physical meaning: \(\operatorname{div}\mathbf{v} > 0\) means material is expanding (diverging flow field), \(\operatorname{div}\mathbf{v} < 0\) means it is compressing. For an incompressible material, \(\dot{J} = 0 \Rightarrow \operatorname{div}\mathbf{v} = 0\).
5.7.6 Cartesian Components
In Cartesian coordinates with unit basis: \[ L_{ij} = \frac{\partial v_i}{\partial x_j}, \quad D_{ij} = \tfrac{1}{2}\left(\frac{\partial v_i}{\partial x_j} + \frac{\partial v_j}{\partial x_i}\right), \quad W_{ij} = \tfrac{1}{2}\left(\frac{\partial v_i}{\partial x_j} - \frac{\partial v_j}{\partial x_i}\right). \]
These are commonly used in finite-strain numerical implementations.
5.7.7 Worked Example: Simple Shear Kinematics
Consider the shearing deformation \(x_1 = X_1 + \gamma(t) X_2, x_2 = X_2, x_3 = X_3\) (shear strain increases with time).
Then \(\mathbf{F} = \begin{pmatrix} 1 & \gamma & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix}\) and the velocity is \(\mathbf{v} = \dot{\mathbf{F}} X_2 \mathbf{e}_1 = \dot{\gamma}X_2\mathbf{e}_1\) at \(\mathbf{x} = (x_1, x_2, x_3)\).
In spatial coords, \(v_1 = \dot{\gamma}x_2, v_2 = 0, v_3 = 0\).
\[ \mathbf{L} = \begin{pmatrix} 0 & \dot{\gamma} & 0 \\ 0 & 0 & 0 \\ 0 & 0 & 0 \end{pmatrix}, \quad \mathbf{D} = \begin{pmatrix} 0 & \dot{\gamma}/2 & 0 \\ \dot{\gamma}/2 & 0 & 0 \\ 0 & 0 & 0 \end{pmatrix}, \quad \mathbf{W} = \begin{pmatrix} 0 & \dot{\gamma}/2 & 0 \\ -\dot{\gamma}/2 & 0 & 0 \\ 0 & 0 & 0 \end{pmatrix}. \]
The strain rate \(\mathbf{D}\) shows shear straining in the 1-2 plane; the spin \(\mathbf{W}\) represents the rotation of material fibers (the skew part encodes rigid-body rotation of the material element).
5.8 Stress Measures — Four Measures and Transformations
5.8.1 Cauchy (True) Stress
The Cauchy stress tensor \(\boldsymbol{\sigma}\) is defined via Cauchy’s theorem: the traction (force per unit current area) on a surface with unit normal \(\mathbf{n}\) in the current configuration is: \[ \mathbf{t} = \boldsymbol{\sigma}\mathbf{n}, \quad \text{or} \quad t_i = \sigma_{ij}n_j. \]
Properties: - Spatial (current-config) tensor, both indices lowercase. - Symmetric: \(\boldsymbol{\sigma} = \boldsymbol{\sigma}^T\) (from angular momentum balance). - Measured in force per unit current area: if a patch of material in the current config has area \(da\) and normal \(\mathbf{n}\), the total force is \(\mathbf{t} \, da = \boldsymbol{\sigma}\mathbf{n} \, da\).
Sign convention (per course): Positive in tension, negative in compression. (Some texts use opposite signs.)
Physical interpretation: This is the “true” stress you would measure with a load cell in an experiment. As the material deforms, both the internal stress (force distribution) and the reference area change, so \(\boldsymbol{\sigma}\) reflects the actual mechanical state in the deformed geometry.
5.8.2 First Piola-Kirchhoff Stress
The 1st Piola-Kirchhoff stress (or nominal stress) \(\mathbf{P}\) relates traction in the reference configuration. Define: \[ \mathbf{t}_0 = \mathbf{P}\mathbf{N}, \quad \text{or} \quad t_{0i} = P_{iJ}N_J. \]
where \(\mathbf{N}\) is the unit normal and \(\mathbf{t}_0\) is the traction on a reference-config surface element with area \(dA\).
To derive the relation between \(\mathbf{P}\) and \(\boldsymbol{\sigma}\), use Nanson’s formula: \[ \mathbf{n} \, da = J\mathbf{F}^{-T}\mathbf{N} \, dA. \]
Consider a reference surface element with traction \(\mathbf{t}_0 dA\) (resulting in force \(\mathbf{t}_0 dA\)). After deformation, this force is still present but distributed over the current surface, so: \[ \mathbf{t}_0 dA = \boldsymbol{\sigma}\mathbf{n} \, da = \boldsymbol{\sigma}(J\mathbf{F}^{-T}\mathbf{N}) \, dA. \]
Thus: \[ \mathbf{P}\mathbf{N} = J\boldsymbol{\sigma}\mathbf{F}^{-T}\mathbf{N} \quad \Rightarrow \quad \mathbf{P} = J\boldsymbol{\sigma}\mathbf{F}^{-T}. \]
Properties: - Two-point tensor: first index spatial (lowercase), second material (uppercase). - Not symmetric in general: \(\mathbf{P} \neq \mathbf{P}^T\) (even though the material is in equilibrium, there is no angular momentum balance in the two-point space). - Measured in force per unit reference area.
Physical interpretation: \(\mathbf{P}\) is useful for Lagrangian formulations because it refers to the known reference configuration. When you specify a displacement boundary condition in FEM, you are working in the reference config; stresses in that frame are naturally expressed via \(\mathbf{P}\).
5.8.3 Second Piola-Kirchhoff Stress
The 2nd Piola-Kirchhoff stress \(\mathbf{S}\) is a pure material-configuration stress defined as: \[ \mathbf{S} = \mathbf{F}^{-1}\mathbf{P} = J\mathbf{F}^{-1}\boldsymbol{\sigma}\mathbf{F}^{-T}. \]
Properties: - Material (reference) tensor, both indices uppercase. - Symmetric: \(\mathbf{S} = \mathbf{S}^T\).
Why is it symmetric? Unlike \(\mathbf{P}\), the second PK stress lives in the reference configuration alone, where the standard angular momentum argument applies. The pull-back operation \(\mathbf{F}^{-1}(\cdot)\mathbf{F}^{-T}\) preserves symmetry.
Physical interpretation: Although \(\mathbf{S}\) is defined mathematically via \(\mathbf{P}\) and \(\mathbf{F}\), it is the natural “conjugate” stress measure for the Green-Lagrange strain \(\mathbf{E}\) in energy and power expressions (see section 7f below).
5.8.4 Kirchhoff Stress
The Kirchhoff stress is simply a rescaled Cauchy stress: \[ \boldsymbol{\tau} = J\boldsymbol{\sigma}. \]
Properties: - Spatial (current) tensor, but with a factor of \(J\) that “moves” it toward a material description. - Symmetric (since \(\boldsymbol{\sigma}\) is).
Utility: In incompressible or nearly-incompressible material models, where volume is nearly conserved (\(J \approx 1\)), we have \(\boldsymbol{\tau} \approx \boldsymbol{\sigma}\). The Kirchhoff stress simplifies many energy expressions and is standard in plasticity algorithms (L08).
5.8.5 Summary and Transformation Table
| Measure | Symbol | Configuration | Symmetry | Conjugate strain-rate | Formula |
|---|---|---|---|---|---|
| Cauchy | \(\boldsymbol{\sigma}\) | Current | Yes | \(\mathbf{D}\) | (defined by Cauchy’s theorem) |
| 1st Piola-Kirchhoff | \(\mathbf{P}\) | Two-point | No | \(\dot{\mathbf{F}}\) | \(J\boldsymbol{\sigma}\mathbf{F}^{-T}\) |
| 2nd Piola-Kirchhoff | \(\mathbf{S}\) | Reference | Yes | \(\dot{\mathbf{E}}\) | \(J\mathbf{F}^{-1}\boldsymbol{\sigma}\mathbf{F}^{-T}\) |
| Kirchhoff | \(\boldsymbol{\tau}\) | Current | Yes | \(\mathbf{D}\) | \(J\boldsymbol{\sigma}\) |
Transformation formulas: \[ \mathbf{P} = J\boldsymbol{\sigma}\mathbf{F}^{-T}, \quad \boldsymbol{\sigma} = J^{-1}\mathbf{F}\mathbf{P}, \quad \mathbf{S} = \mathbf{F}^{-1}\mathbf{P} = J\mathbf{F}^{-1}\boldsymbol{\sigma}\mathbf{F}^{-T}. \]
5.8.6 Worked Example: Uniaxial Loading
Consider the uniaxial tension deformation with \(\lambda_1 = \lambda_2 = \lambda, \lambda_3 = 1/\lambda^2\) (constant volume), giving stretches \(\mathbf{F} = \text{diag}(\lambda, \lambda, 1/\lambda^2)\) and \(J = 1\).
Suppose the material is linearly elastic with modulus \(E\). The Cauchy stress is approximately \(\boldsymbol{\sigma} \approx \begin{pmatrix} E(\lambda - 1/\lambda^4) & 0 & 0 \\ 0 & -0.5E(\lambda - 1/\lambda^4) & 0 \\ 0 & 0 & -0.5E(\lambda - 1/\lambda^4) \end{pmatrix}\) (simplified form for illustration).
The 1st PK becomes \(\mathbf{P} = \boldsymbol{\sigma}\mathbf{F}^{-T} = \begin{pmatrix} E(\lambda - 1/\lambda^4)/\lambda & 0 & 0 \\ 0 & -0.5E(\lambda - 1/\lambda^4)/\lambda & 0 \\ 0 & 0 & -0.5E(\lambda - 1/\lambda^4)\lambda^2 \end{pmatrix}\) (showing the two-point nature: different scalings per component).
5.9 Stress-Strain Conjugates and Work Expressions
5.9.1 Power Conjugacy
In the energy balance, the rate of stress power (energy flux) per unit material volume is: \[ P_\text{int} = \int_{\Omega_t} \boldsymbol{\sigma} : \mathbf{D} \, dv = \int_{\Omega_0} \mathbf{P} : \dot{\mathbf{F}} \, dV = \int_{\Omega_0} \mathbf{S} : \dot{\mathbf{E}} \, dV = \int_{\Omega_t} \boldsymbol{\tau} : \mathbf{D} \, dv. \]
All four expressions are equivalent and equal the rate of internal energy (per unit time). The pairs \((\boldsymbol{\sigma}, \mathbf{D})\), \((\mathbf{P}, \dot{\mathbf{F}})\), \((\mathbf{S}, \dot{\mathbf{E}})\), and \((\boldsymbol{\tau}, \mathbf{D})\) are called work-conjugate pairs.
Derivation (sketch): Start with \(P_\text{int} = \int\boldsymbol{\sigma}:\mathbf{D}\,dv\). Using \(\mathbf{D} = \mathbf{F}^{-T}\dot{\mathbf{E}}\mathbf{F}^{-1}\) (pull-back) and \(dv = J dV\): \[ \int\boldsymbol{\sigma}:\mathbf{D}\,dv = \int\boldsymbol{\sigma}:(\mathbf{F}^{-T}\dot{\mathbf{E}}\mathbf{F}^{-1}) J \, dV. \]
Rearranging using cyclic permutation of the double contraction: \[ \boldsymbol{\sigma}:(\mathbf{F}^{-T}\dot{\mathbf{E}}\mathbf{F}^{-1}) = (J\mathbf{F}^{-1}\boldsymbol{\sigma}\mathbf{F}^{-T}):\dot{\mathbf{E}} = \mathbf{S}:\dot{\mathbf{E}}. \]
Thus, \(\int\boldsymbol{\sigma}:\mathbf{D}\,dv = \int\mathbf{S}:\dot{\mathbf{E}} \, dV\) ✓
5.9.2 Implications for Constitutive Laws
In a hyperelastic material, the Helmholtz free energy \(\Psi\) per unit reference volume is a function of the deformation gradient (or strain). The stress is derived from this energy: \[ \mathbf{S} = \rho_0 \frac{\partial\Psi}{\partial\mathbf{E}}, \quad \boldsymbol{\sigma} = J^{-1}\mathbf{F}\mathbf{S}\mathbf{F}^T = J^{-1}\rho_0\mathbf{F}\frac{\partial\Psi}{\partial\mathbf{E}}\mathbf{F}^T. \]
The choice of which pair to use depends on the formulation: - Lagrangian FEM (material-frame): Use \((\mathbf{S}, \dot{\mathbf{E}})\) or \((\mathbf{P}, \dot{\mathbf{F}})\). - Eulerian FEM (spatial-frame): Use \((\boldsymbol{\sigma}, \mathbf{D})\) or \((\boldsymbol{\tau}, \mathbf{D})\). - Plasticity (usually Lagrangian): Use \((\mathbf{S}, \dot{\mathbf{E}})\) or \((\boldsymbol{\sigma}, \mathbf{D})\) depending on the strain measure.
The equivalence of the power expressions ensures thermodynamic consistency across all formulations.
5.10 Objectivity of Stress Rates
Material frame invariance: Under a superimposed rigid-body motion \(\mathbf{x}^* = \mathbf{Q}(t)\mathbf{x} + \mathbf{c}(t)\) (where \(\mathbf{Q}\) is orthogonal and \(\mathbf{c}\) is a translation):
- Cauchy stress \(\boldsymbol{\sigma}\) is objective: \(\boldsymbol{\sigma}^* = \mathbf{Q}\boldsymbol{\sigma}\mathbf{Q}^T\).
- The material time derivative \(\dot{\boldsymbol{\sigma}}\) is NOT objective — it changes under rigid rotation.
- 2nd Piola-Kirchhoff \(\mathbf{S}\) is objective (lives in the material frame, which is unrotated).
- The rate \(\dot{\mathbf{S}}\) is also objective (both are material-frame quantities).
This asymmetry is crucial: when writing rate-form constitutive equations like \(\dot{\boldsymbol{\sigma}} = \mathbb{C}:\mathbf{D}\), the equation is not objective unless additional rotation-correction terms are added. Common objective stress rates are:
- Jaumann rate: \(\overset{\circ}{\boldsymbol{\sigma}} = \dot{\boldsymbol{\sigma}} - \mathbf{W}\boldsymbol{\sigma} + \boldsymbol{\sigma}\mathbf{W}\) (corrects for local spin \(\mathbf{W}\)).
- Green-Naghdi rate, Truesdell rate (alternative definitions; see L02 for detailed proofs).
Recommendation: For any rate-form hypoelastic model (e.g., plasticity), use an objective rate of stress. The second Piola-Kirchhoff \(\mathbf{S}\) is automatically objective; if using Cauchy stress, apply a rate correction. See L02 for rigorous treatment and L08 for algorithmic implementation in plasticity.
5.11 Conservation Laws
Mass: \(\dot{\rho} + \rho\nabla\cdot\mathbf{v} = 0\) (spatial), or \(\rho J = \rho_0\) (material).
Linear momentum: \[ \nabla\cdot\boldsymbol{\sigma} + \rho\mathbf{b} = \rho\ddot{\mathbf{x}} \]
Angular momentum: \(\boldsymbol{\sigma} = \boldsymbol{\sigma}^T\) (symmetry of Cauchy stress).
Energy: First law of thermodynamics (developed in L04).
5.12 Preliminaries: Material Derivative
The material derivative of the Jacobian determinant of the deformation gradient \(\mathbf{F}\): \[ \frac{DJ}{Dt} = J \operatorname{div}(\mathbf{v}) = J\frac{\partial v_i}{\partial x_i} \]
The material derivative of an integral over a moving domain is: \[ \frac{D}{Dt}\int_{\Omega} f(\mathbf{x},t)d\Omega = \lim_{\Delta t\to 0}\frac{1}{\Delta t} \left (\int_{\Omega_{t+\Delta t}} f(\mathbf{x},t+\Delta t)d\Omega - \int_{\Omega_{t}} f(\mathbf{x},t)d\Omega \right ) \]
where \(\Omega_t\) is the spatial domain at time \(t\) and \(f(\mathbf{x},t)\) is a function defined on that domain.
We can express the right-hand side in the reference configuration using the Jacobian of the deformation gradient: \[ \frac{D}{Dt}\int_{\Omega} f d\Omega = \int_{\Omega_0} \frac{\partial}{\partial t}[f(\mathbf{X},t)J(\mathbf{X},t)] d \Omega_0 \]
After rearranging: \[ \frac{D}{Dt}\int_{\Omega}f d\Omega = \int_{\Omega_0}\left(\frac{\partial f}{\partial t}J + f\frac{\partial J}{\partial t}\right)d\Omega_0 = \int_{\Omega_0}\left(\frac{\partial f}{\partial t}J + fJ\frac{\partial v_i}{\partial x_i}\right)d\Omega_0 \]
Transforming back to the current configuration yields Reynolds’ Transport Theorem: \[ \frac{D}{Dt}\int_{\Omega}f d\Omega = \int_{\Omega}\left( \frac{Df(\mathbf{x},t)}{Dt} +f\frac{\partial v_i}{\partial x_i}\right )d\Omega \]
which can also be written as: \[ \frac{D}{Dt}\int_{\Omega}f d\Omega = \int_{\Omega}\left( \frac{\partial f}{\partial t} +\operatorname{div}(\mathbf{v}f)\right )d\Omega \]
or using Gauss’s theorem: \[ \frac{D}{Dt}\int_{\Omega}f d\Omega = \int_{\Omega} \frac{\partial f}{\partial t}d\Omega + \int_{\Gamma}f\mathbf{v}\cdot\mathbf{n}d\Gamma \]
where \(\Gamma\) is the boundary of the domain \(\Omega\) and \(\mathbf{n}\) is the outward normal vector.
5.13 Conservation of Linear Momentum (Detailed)
The total force on a system is given by: \[ \mathbf{f}(t) = \int_{\Omega}\rho \mathbf{b}(\mathbf{x},t)d\Omega + \int_{\Gamma}\mathbf{t}(\mathbf{x},t)d\Gamma \]
where \(\mathbf{b}\) is the body force per unit mass and \(\mathbf{t}\) is the traction vector. The linear momentum is: \[ \mathbf{p}(t) = \int_{\Omega}\rho \mathbf{v}(\mathbf{x},t)d\Omega \]
Newton’s second law states: \[ \frac{D\mathbf{p}}{Dt} = \mathbf{f}(t) \Rightarrow \frac{D}{Dt}\int_{\Omega}\rho \mathbf{v}(\mathbf{x},t)d\Omega = \int_{\Omega}\rho \mathbf{b}(\mathbf{x},t)d\Omega + \int_{\Gamma}\mathbf{t}(\mathbf{x},t)d\Gamma \]
Using Reynolds’ theorem and Gauss’s theorem with \(\mathbf{t} = \boldsymbol{\sigma}\mathbf{n}\): \[ \int_{\Gamma}\mathbf{t}d\Gamma = \int_{\Gamma}\boldsymbol{\sigma}\mathbf{n}d\Gamma = \int_{\Omega}\operatorname{div}(\boldsymbol{\sigma})d\Omega \]
After manipulation we arrive at the local form: \[ \rho \frac{D\mathbf{v}}{Dt} = \operatorname{div}(\boldsymbol{\sigma}) + \rho \mathbf{b} \]
This is the equation of motion (momentum balance) in spatial form.
5.14 Conservation of Energy (First Law of Thermodynamics)
For thermomechanical processes, the rate of change of total energy is: \[ P^{tot} = P^{int} + P^{kin} \]
with: \[ P^{int} = \frac{D}{Dt}\int_{\Omega}\rho \omega^{int} d\Omega, \quad P^{kin} = \frac{D}{Dt}\int_{\Omega}\frac{1}{2}\rho \mathbf{v} \cdot \mathbf{v} d\Omega \]
where \(\omega^{int}\) is the specific internal energy and \(\omega^{kin}\) is the specific kinetic energy.
The rate of external work is: \[ P^{ext} = \int_{\Gamma}\mathbf{v} \cdot \mathbf{t} d\Gamma + \int_{\Omega}\mathbf{v} \cdot \rho \mathbf{b} d\Omega \]
And heat sources contribute: \[ P^{heat} = \int_{\Omega}\rho s d\Omega -\int_{\Gamma}\mathbf{n}\cdot \mathbf{q} d\Gamma \]
where \(\mathbf{q}\) is the heat flux vector and \(s\) is the volumetric heat source per unit mass.
The Total Energy Balance is: \[ P^{tot} = P^{ext} + P^{heat} \]
After applying Reynolds’ theorem, Gauss’ theorem, and the momentum balance equation, we obtain the energy equation in spatial form: \[ \rho \frac{D\omega^{int}}{Dt} = \mathbf{d} : \boldsymbol{\sigma} -\operatorname{div}(\mathbf{q}) + \rho s \]
where \(\mathbf{d}\) is the rate of deformation tensor and \(\omega^{int}\) is the internal energy per unit mass.
In Lagrangian form (material configuration), using the first Piola-Kirchhoff stress \(\mathbf{P}\) and material (reference) gradient \(\nabla_0\): \[ \rho_0 \dot{\omega}^{int} = \dot{\mathbf{F}}^T :\mathbf{P} -\nabla_0\cdot \mathbf{q} + \rho_0 s \]
where \(\rho_0\) is the reference density.
5.15 Strong Form and Weak Form: Principle of Virtual Work
We start with the static equilibrium equation (strong form) in domain \(\Omega\): \[ \operatorname{div}(\boldsymbol{\sigma}) = \mathbf{0} \quad \text{in } \Omega \]
Subject to boundary conditions: - Essential (Dirichlet) BCs: \(\mathbf{u} = \bar{\mathbf{u}}\) on \(\Gamma_u\) - Natural (Neumann) BCs: \(\boldsymbol{\sigma} \mathbf{n} = \bar{\mathbf{t}}\) on \(\Gamma_t\)
For nonlinear materials, stress is a nonlinear function of strain: \[ \boldsymbol{\sigma} = \boldsymbol{\sigma}(\boldsymbol{\varepsilon}(\nabla\mathbf{u})) \]
To derive the weak form, multiply the equilibrium equation by a virtual displacement field \(\delta\mathbf{u}\) (satisfying \(\delta\mathbf{u} = \mathbf{0}\) on \(\Gamma_u\)) and integrate: \[ \int_{\Omega} \operatorname{div}(\boldsymbol{\sigma}) \cdot \delta\mathbf{u} \, dv = 0 \]
Using the divergence theorem and applying boundary conditions, we obtain the Principle of Virtual Work: \[ \int_{\Omega} \boldsymbol{\sigma} : \delta\boldsymbol{\varepsilon} \, dv = \int_{\Gamma_t} \bar{\mathbf{t}} \cdot \delta\mathbf{u} \, da \]
where \(\delta\boldsymbol{\varepsilon} = \operatorname{sym}(\nabla(\delta\mathbf{u}))\) is the virtual strain.
This equation holds for all admissible virtual displacements: internal virtual work = external virtual work.
5.16 Finite Element Discretization
We discretize the domain into elements \(\Omega_e\). Within each element, we approximate the displacement using shape functions \(\mathbf{N}(\mathbf{x})\) and nodal displacements \(\mathbf{d}_e\): \[ \mathbf{u}(\mathbf{x}) \approx \mathbf{N}(\mathbf{x}) \mathbf{d}_e \quad \Rightarrow \quad \boldsymbol{\varepsilon}(\mathbf{x}) \approx \mathbf{B}(\mathbf{x}) \mathbf{d}_e \]
Similarly for virtual fields: \[ \delta\mathbf{u}(\mathbf{x}) = \mathbf{N}(\mathbf{x}) \delta\mathbf{d}_e \quad \Rightarrow \quad \delta\boldsymbol{\varepsilon}(\mathbf{x}) = \mathbf{B}(\mathbf{x}) \delta\mathbf{d}_e \]
where \(\mathbf{B}\) is the strain-displacement matrix (containing spatial derivatives of \(\mathbf{N}\)).
Substituting into the weak form and assembling over all elements: \[ \sum_e \int_{\Omega_e} \mathbf{B}^T \boldsymbol{\sigma}(\mathbf{B} \mathbf{d}_e) \, dv = \sum_e \int_{\Gamma_{t,e}} \mathbf{N}^T \bar{\mathbf{t}} \, da \]
This defines: - Internal Force Vector: \(\mathbf{f}_{\text{int}}(\mathbf{d}) = \text{Assembly} \left( \int_{\Omega_e} \mathbf{B}^T \boldsymbol{\sigma}(\boldsymbol{\varepsilon}(\mathbf{d})) \, dv \right)\) - External Force Vector: \(\mathbf{f}_{\text{ext}} = \text{Assembly} \left( \int_{\Gamma_{t,e}} \mathbf{N}^T \bar{\mathbf{t}} \, da \right)\)
The discrete equilibrium equation is: \[ \mathbf{f}_{\text{int}}(\mathbf{d}) = \mathbf{f}_{\text{ext}} \]
or equivalently, find the root of the residual vector: \[ \mathbf{R}(\mathbf{d}) = \mathbf{f}_{\text{int}}(\mathbf{d}) - \mathbf{f}_{\text{ext}} = \mathbf{0} \]
5.17 Nonlinearity in FEM
Material Nonlinearity: If the material law \(\boldsymbol{\sigma} = \mathbf{D}\boldsymbol{\varepsilon}\) is linear, the stiffness matrix is constant and we have a linear system \(\mathbf{K}\mathbf{d} = \mathbf{f}_{\text{ext}}\).
If the material law is nonlinear \(\boldsymbol{\sigma} = \boldsymbol{\sigma}(\boldsymbol{\varepsilon})\), then \(\mathbf{f}_{\text{int}}(\mathbf{d})\) is a nonlinear function of \(\mathbf{d}\), leading to a system of nonlinear algebraic equations.
Geometric Nonlinearity: For small deformations, we use the infinitesimal strain: \[ \boldsymbol{\varepsilon}_{\text{lin}} = \frac{1}{2}(\nabla\mathbf{u} + (\nabla\mathbf{u})^T) \]
where \(\mathbf{\epsilon}_{\text{lin}} \approx \mathbf{B}_{\text{lin}} \mathbf{d}\) is linear in \(\mathbf{d}\).
For large deformations, we use the Green-Lagrange strain: \[ \mathbf{E} = \frac{1}{2}(\mathbf{F}^T\mathbf{F} - \mathbf{I}) = \underbrace{\frac{1}{2}(\nabla\mathbf{u} + (\nabla\mathbf{u})^T)}_{\text{linear}} + \underbrace{\frac{1}{2}(\nabla\mathbf{u})^T(\nabla\mathbf{u})}_{\text{quadratic term}} \]
The quadratic term is negligible for small deformations but essential for large deformations.
After FE discretization with \(\nabla\mathbf{u} \approx \mathbf{G}\mathbf{d}_e\): \[ \mathbf{E} \approx \underbrace{\frac{1}{2}(\mathbf{G}\mathbf{d}_e + (\mathbf{G}\mathbf{d}_e)^T)}_{\text{linear in }\mathbf{d}_e} + \underbrace{\frac{1}{2}(\mathbf{G}\mathbf{d}_e)^T(\mathbf{G}\mathbf{d}_e)}_{\text{quadratic in }\mathbf{d}_e} \]
The strain becomes a nonlinear (quadratic) function of nodal displacements, often written as: \[ \boldsymbol{\varepsilon}_{\text{NL}} \approx (\mathbf{B}_0(\mathbf{x}) + \mathbf{B}_L(\mathbf{x}, \mathbf{d}_e)) \mathbf{d}_e \]
Consequences: - Even with a linear material law, geometric nonlinearity makes \(\mathbf{f}_{\text{int}}(\mathbf{d})\) nonlinear because strain depends nonlinearly on \(\mathbf{d}\). - The tangent stiffness matrix \(\mathbf{K}_T = \frac{\partial\mathbf{f}_{\text{int}}}{\partial\mathbf{d}}\) includes both material and geometric stiffness contributions.
5.18 Newton-Raphson Iteration
To solve the nonlinear system \(\mathbf{R}(\mathbf{d}) = \mathbf{0}\), we use Newton-Raphson iteration.
Starting from an estimate \(\mathbf{d}_i\), we seek a correction \(\Delta\mathbf{d}\) such that \(\mathbf{R}(\mathbf{d}_i + \Delta\mathbf{d}) \approx \mathbf{0}\).
Using a Taylor expansion: \[ \mathbf{R}(\mathbf{d}_i + \Delta\mathbf{d}) \approx \mathbf{R}(\mathbf{d}_i) + \left[\frac{\partial\mathbf{R}}{\partial\mathbf{d}}\right]_{\mathbf{d}_i} \Delta\mathbf{d} \]
Setting the approximation to zero gives the iterative update: \[ \left[\frac{\partial\mathbf{R}}{\partial\mathbf{d}}\right]_{\mathbf{d}_i} \Delta\mathbf{d} = -\mathbf{R}(\mathbf{d}_i) \]
The Jacobian matrix is the Tangent Stiffness Matrix: \[ \mathbf{K}_T(\mathbf{d}_i) = \left[\frac{\partial\mathbf{f}_{\text{int}}}{\partial\mathbf{d}}\right]_{\mathbf{d}_i} \]
Differentiating the internal force expression: \[ \mathbf{K}_T \approx \text{Assembly} \int_{\Omega_e} \mathbf{B}^T \left(\frac{\partial\boldsymbol{\sigma}}{\partial\boldsymbol{\varepsilon}}\right) \mathbf{B} \, dv \]
where \(\mathbf{D}_T = \frac{\partial\boldsymbol{\sigma}}{\partial\boldsymbol{\varepsilon}}\) is the material tangent modulus, evaluated at the current strain state.
Newton-Raphson algorithm:
- Calculate residual: \(\mathbf{R}_i = \mathbf{f}_{\text{int}}(\mathbf{d}_i) - \mathbf{f}_{\text{ext}}\)
- Calculate tangent stiffness: \(\mathbf{K}_T(\mathbf{d}_i)\)
- Solve linear system: \(\mathbf{K}_T(\mathbf{d}_i) \Delta\mathbf{d} = -\mathbf{R}_i\)
- Update solution: \(\mathbf{d}_{i+1} = \mathbf{d}_i + \Delta\mathbf{d}\)
- Repeat until convergence (e.g., \(\|\Delta\mathbf{d}\| < \varepsilon\))